



近年、海洋開発において水中ドローンやロボットの活躍が進む中、水中無線通信へのニーズが高まっている。陸上と異なり電波や光が届きにくい水中で、音波を使った無線通信の実現に取り組んでいる海老原准教授は、多くの課題に挑戦しながら、スマート水中センシングの実現を目指している。

写真:海老原研究室の学生と
音を使った無線通信
陸上の無線通信に用いられる電波や光は、水中では遠くまで届きにくいので、長距離の通信にはあまり適していません。一方、音波は水中でも遠くまで届くので、水中無線通信の媒体として有望です。しかし、音波の伝搬速度が電波や光に比べて極めて遅い点が課題になります。
水中無線通信では、送信機で情報を音波に変調して出力し、受信機がそれを復調して情報に戻します。このとき、水中ロボットが移動すると、音波の周波数が変化する現象(ドップラーシフト)が発生します。音波は伝搬速度が遅いため、わずかな移動でも大きな周波数変化が発生します。さらに、沿岸域のような浅い海では、音波が海面や海底で反射を繰り返し、複数の経路(マルチパス)を形成するため、これが通信エラーの原因となります。
こうしたドップラーシフトやマルチパスの影響を受信機側で信号処理により除去できれば、より低電力で安定した通信が可能となり、バッテリー駆動の水中ドローンやロボットの稼働時間を延ばすことが出来ます。このように、海洋開発に不可欠な浅海域での安定した無線通信を実現するには、多くの技術的課題を克服する必要があります(図1)。
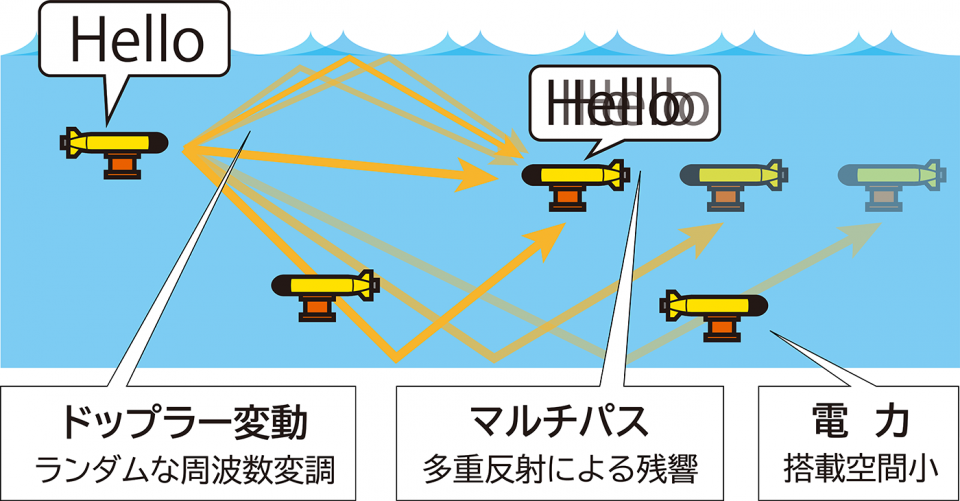
図1:水中での通信の課題 (提供:筑波大学通信システム(海老原)研究室)
新しい通信システムの実用化
ここで注目したのは「直交信号分割多重(Orthogonal signal division multiplexing; OSDM)」という通信技術です。もともとマルチパスの影響が大きい移動体通信のために開発された技術ですが、水中音響通信にも応用できるのではないかと考え、研究を開始しました。先行研究が殆どない中での手探りの挑戦でしたが、アメリカやオランダの研究者との出会いを通じてこの方法の可能性を確信し、研究を進めることができました。シミュレーションや水槽実験を重ねた結果、最終的にはマルチパスやドップラーシフトの影響が顕著な浅い海でも運用できる通信システムを構築するに至りました。そして、駿河湾沖での実海域実験では、安定した移動体通信を実証することに成功しました(図2)。今後は、通信距離や通信品質をさらに向上すべく、研究を続けています。
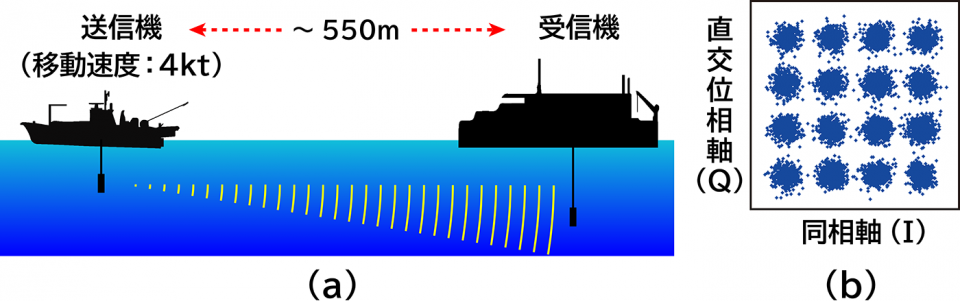
図2:実海域での移動体通信実験 (提供:筑波大学通信システム(海老原)研究室) 送信機を計測船に、受信機をバージに搭載し、送信機を移動させながら連続的に信号を受信機に伝送した (a)。受信した信号を解析したところ、受信信号の振幅-位相分布のばらつきが雑音レベルに収束しており、移動しつつ良好な通信品質が達成できることが確認できた(b)。
音響通信を利用して位置を計測
この音響通信技術は、水中での高精度な位置計測にも結び付きました。近年、防波堤建設の効率化に向けて水中建設ロボットの導入が進んでいます。安全に工事を進めるためには、ロボットの位置を正確に知ることが必要ですが、水中ではGPSが利用できないので、超音波を利用した測位が行われます。ところが、港湾工事は浅い海で行われることが多く、通信と同様にマルチパスの影響が顕著であり、従来は高精度な測位が困難でした。
そこで、海洋土木工事を専門とする建設会社と共同で、測位演算に不要な反射波を排除することで、高精度に位置を特定出来るシステムを世界に先駆けて開発しました。さらに小型化した通信装置を水中ドローンやロボットに搭載し、海洋工事の効率化を実現しようとしています。現在の水中作業は潜水士に大きく依存しており、危険を伴うものが少なくありませんが、この技術が実用化されれば、その負担を大幅に軽減できるでしょう。
洋上風力発電などの普及などにより、今後、水中の無線通信や測位の重要性はますます重要になるでしょう。将来は、私たちが開発した技術によるスマート水中センシングの実現を目指しています。
(取材日:2025年8月5日)

