



「退官するまでには人間の肉体労働をなくします」と、筑波大学の採用面接で宣言した境野准教授。これを目指し、ロボットの研究開発をバイラテラル制御とAIの融合で進めている。バイラテラル制御は、大学院時代から研究を手掛けてきた根底となる技術だ。
遠く離れたロボット同士が互いの動きだけでなく、触覚も伝え合う
バイラテラル制御を使えば、距離を隔てて置いた2台のロボットの動きはもちろんのこと、触覚も互いに伝え合うことができます。例えば、手術ロボットでは、医師が操作・指令するリーダロボットの触覚・動きと、その操作に従いメスなどで身体に直接触れて手術するフォロワロボットの触覚・動きを同期させ、安全に遠隔手術ができるしくみです(図1)。
しかし、バイラテラル制御は、医療や宇宙開発などの分野以外ではほとんど使われていません。ロボットが2台必要なので、お金をかけられる分野でないと導入が難しい。でも、どこかに使える何かがあるのではと、この技術に携わってきました。扉を開いたのはAIです。
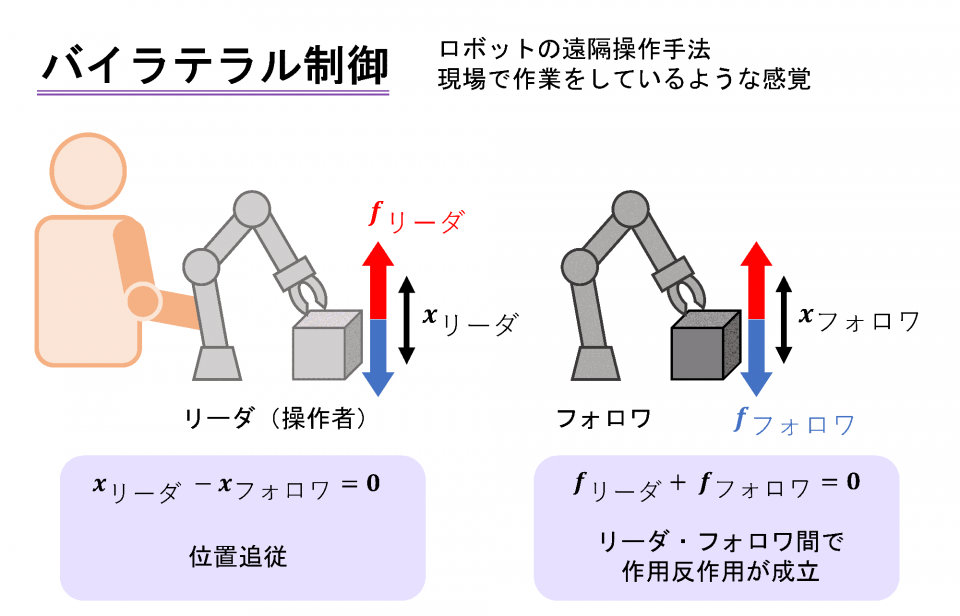
図1:バイラテラル制御(提供:筑波大学モーションコントロール(境野)研究室)
バイラテラル制御で、AIロボットに力加減を学習させる
2016年に、AIロボットを研究している学生の「画像認識によって、初めて見たものでもつかめる」という発表を見たのですが、つかみ方が下手でボロボロ落としていました。その時「手の動きの制御だけではなく、触覚の強さ“力加減”が重要だ。バイラテラル制御を使えば、AIロボットに動きだけでなく、力加減も学習させられる!」と気づきました。
私たちが、湯飲みもファイルも自然に持てるのは、赤ん坊の頃から持つという動作はもちろん、さまざまなものに触ってその力加減を学習してきたからです。包丁などの道具を使いいろいろな作業をするにも力加減が不可欠です。人間がまず必要な力加減と動きを認識し、これをバイラテラル制御でAIロボットに教え込めば、簡便かつ短時間で学習させることができます。
家事ロボットの研究開発を通して「知能の本質」を考える
今、最も実現したいのは「家事ロボット」です。種々の道具を絶妙な力加減で操り、料理や掃除や洗濯をこなす…。従来の産業用ロボットのように1つの作業を超精密にかつ素早く行うのではなく、さまざまな仕事をそこそこの精度と速度でこなしていく、より人間に近いロボットですね。その領域が今まで手付かずで空いていました。バイラテラル制御とAIの融合でこの領域を切り拓いていこうと思っています。
その一端として2024年5月に「ロボットによるイクラ丼の盛り付け競技会」(IEEE RAS 主催の国際会議「ICRA2024 in Yokohama」で開催)に参加し、優勝しました。既存のロボットに、右手で台から丼を持ち上げ、左手のお玉でイクラを丼に盛り付け、丼を台に戻すという一連の作業の動きと力加減を学習させたのですが、スムーズにいきました(図2)。AIロボットの専門家から驚かれたのは、開催日のわずか2日前に、会場でバイラテラル制御を使って人間が教示し、指令データを更新したことです。通常のAIロボットの学習では、何週間も何か月もかけて学習用データを取り、これをAIに学習させるのにも時間をかけ、指令データを作りこんだものを会場に持ち込むという手順になります。
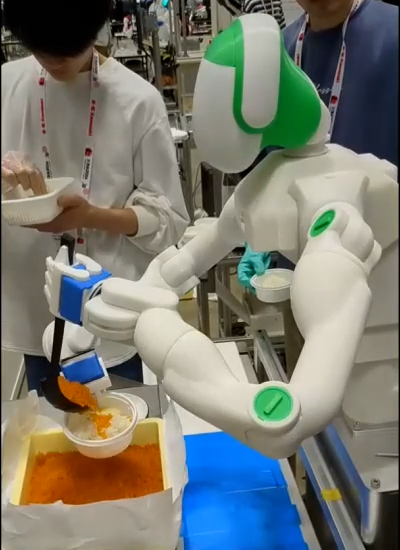
図2:「イクラ丼の盛り付け競技会」で優勝したロボット
出典:https://arxiv.org/pdf/2504.19498
動画:https://x.com/shosakaino/status/1791030970914914566
提供:筑波大学モーションコントロール(境野)研究室
一般にロボットに1つの動作を生成させるのに半年から1年かかるといわれ、かかる費用も膨大になります。しかし、私たちの技術を使えば、工場の中という条件なら、お玉をトングやフォークなどに持ち代えて、ハンバーグやサラダなど種々の料理を盛り付けるAIロボットを1年以内に実装できると思います。
このようにしてAIロボットが人間の家事労働を代替していく研究開発を進めていけば、やがては「知能とは何か」という根源的な問いかけに近づけるのではないか、という期待をどこかで強く抱いていますね。
(取材日:2025年7月31日)

