



With the growing use of underwater drones and robots in marine development in recent years, the demand for underwater wireless communication has been increasing. Unlike on land, where radio waves and light easily propagate, these signals are difficult to transmit underwater. Associate Professor Ebihara is working on realizing wireless communication using sound waves, taking on many challenges along the way, with the ultimate goal of achieving smart underwater sensing.

With students from the Ebihara Laboratory
Wireless Communication Using Sound
Radio waves and light, which are used for terrestrial wireless communication, do not easily propagate over long distances underwater, making them unsuitable for long-range communication. In contrast, sound waves travel much farther in water and, thus, are regarded as a promising medium for underwater wireless communication. However, a major challenge lies in the markedly slower propagation speed of sound than of radio waves and light.
In underwater wireless communication, a transmitter modulates information into sound waves and outputs them, while a receiver demodulates the signal back into information. When an underwater robot is in motion, the frequency of the sound waves shifts, a phenomenon known as the Doppler shift. Since sound propagates slowly, even slight movement causes large frequency changes. Moreover, in shallow coastal areas, sound waves repeatedly reflect off the sea surface and seabed, creating multiple paths (multipath propagation) before reaching the receiver, which, in turn, lead to communication errors.
If signal processing at the receiver side successfully mitigates the effects of the Doppler shift and multipath propagation, more stable communication with lower power consumption may be achieved, thereby extending the operating time of battery-powered underwater drones and robots. Therefore, many technical challenges must be overcome to achieve stable wireless communication in shallow waters, which is essential for marine development (Fig. 1).
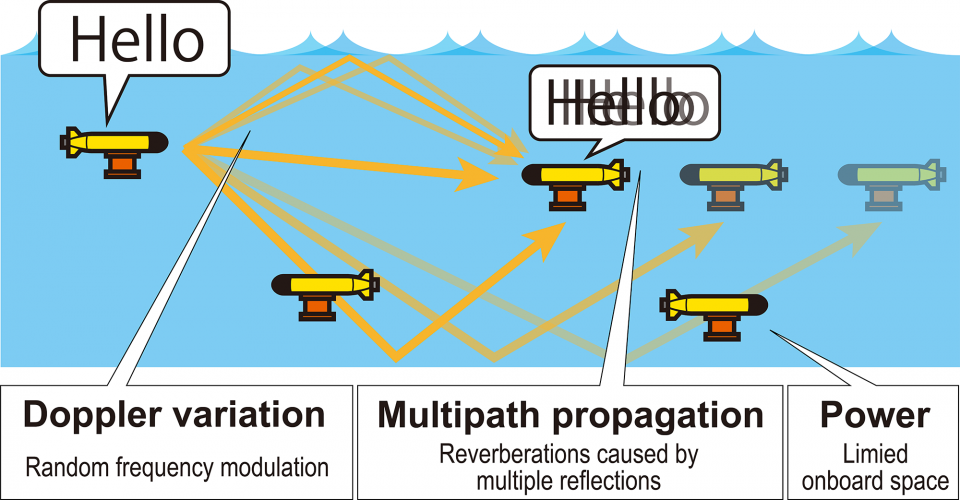
Figure 1. Challenges in Underwater Communication (Provided by Communication Systems Laboratory [Ebihara], University of Tsukuba)
Practical Implementation of a New Communication System
Our focus has been on a communication technology known as Orthogonal Signal Division Multiplexing. Originally developed for mobile communication systems where multipath interference is significant, we hypothesized that this technique may also be applied to underwater acoustic communication and, thus, began our research. Since this field of research is in its infancy, it was initially an exploratory challenge. However, through encounters and collaborations with researchers in the United States and the Netherlands, we became convinced of the potential of this method and were able to advance our work. Through repeated simulations and water tank experiments, we eventually succeeded in developing a communication system capable of operating even in shallow waters, where the effects of multipath propagation and the Doppler shift are pronounced. Furthermore, during sea trials off Suruga Bay, we successfully demonstrated stable mobile communication (Fig. 2). We are now continuing our research with the aim of achieving further improvements in both the range and quality of communication.
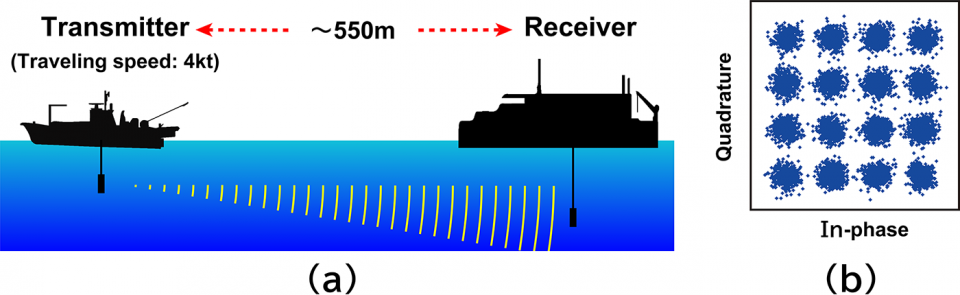
Figure 2. Field Experiment on Mobile Communication in Open Water (Provided by Communication Systems Laboratory [Ebihara], University of Tsukuba) The transmitter was mounted on a survey vessel and the receiver on a barge. Signals were continuously transmitted to the receiver while the transmitter was in motion (a). An analysis of the signals received showed that variations in the amplitude–phase distribution converged to the noise level, confirming the maintenance of good communication quality during movement (b).
Positioning with Acoustic Communication
Acoustic communication technology has also led to high-precision positioning underwater. In recent years, underwater construction robots have been increasingly introduced to improve the efficiency of breakwater construction. The accurate selection of robot positions is essential for safe operations. However, since GPS cannot be used underwater, positioning is conducted using ultrasonic waves. The associated challenge is that port construction often occurs in shallow waters, where, as with communication, multipath propagation is pronounced, making it difficult to achieve high positioning accuracy with conventional methods.
To address this issue, in collaboration with a construction company specializing in marine civil engineering, we became the first in the world to develop a system capable of accurately selecting robot positions by eliminating unnecessary reflected waves from positioning calculations. We are also working on mounting miniaturized communication devices on underwater drones and robots to further improve the efficiency of marine construction. Many underwater operations currently rely heavily on divers and are associated with significant risks; however, once this technology is put into practice, it is expected to markedly reduce the burden on divers.
With the expansion of offshore wind power and other marine developments, the importance of underwater wireless communication and positioning will only continue to increase. In the future, our goal is to realize smart underwater sensing using the technologies we have developed.
(Date of interview: August 5, 2025)

